Finally kicked off the work for MBX 2.0.
Finished the gearboxes today, made some new shafts and realigned the gears a bit. Layed the parts out and it looks like it’s going to be nearly as compact as the 1 wheel version. I believe it should all wedge into a 350mm x 350mm hexgon or octagon shape.

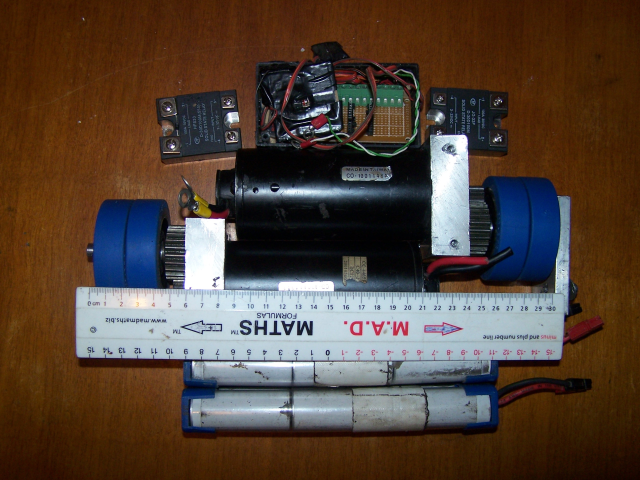
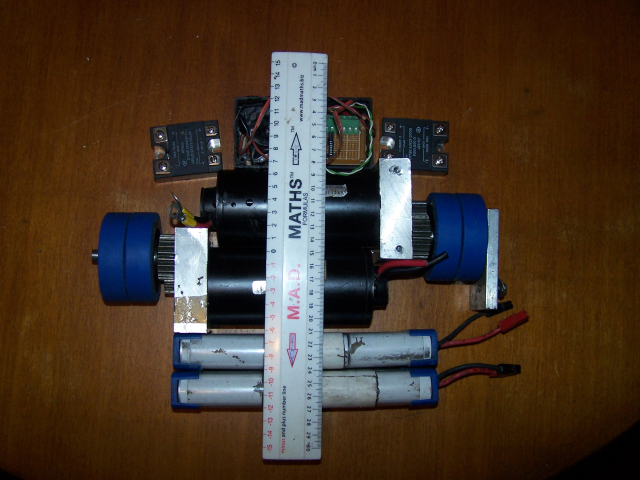
Some rough calculations based on voltage, gearing and wheel base predict that it should hit 1250RPM, a good 500-600RPM more then it showed @ RoboWars. I’ll have the accelerometer working this time, so it should be much much more driveable and it should translate faster with two wheels.
Will start on the hardox body next weekend.